
Membro VIP

GS-5050A
Especificações técnicas do sensor de deslocamento GS-5050A (alcance/resolução): (50mm/10um), GS-5100A (100mm/10um), GS-5051A (50mm/1um), GS-5101A (100
Detalhes do produto
Sensor de deslocamento GS-5050A
Características do produto:
Modelo de largura (GS-5050A/GS-5051A/GS-5100A/GS-5101A):
● Utilização de mecanismos de rolamentos de esferas
Novos modelos com alcance aumentado de 100 mm e resolução de 1 μm
● Na instalação, a posição de configuração é a mesma distância do ponto final da barra de medição do GS-5011.
Especificações técnicas (alcance / resolução): (50mm / 10um), GS-5100A (100mm / 10um), GS-5051A (50mm / 1um), GS-5101A (100mm / 1um)
Parâmetros técnicos:
Modelo |
GS-5100A |
GS-5051A |
GS-5101A |
|
Alcance de medição |
50 mm |
100 mm |
50 mm |
100 mm |
Resolução |
10 μm |
1 μm |
||
Precisão de exibição (20 °C) |
10 μm |
12 μm |
4 μm |
5 μm |
Velocidade de resposta ※1 |
1(4) m/s |
0.3(1.2) m/s |
||
Medição da pressão (para baixo) *2 |
Abaixo de 3 N |
Menos de 5,5 N |
Abaixo de 3 N |
Menos de 5,5 N |
Medição da faixa de ajuste da pressão (opcional) *2 | ||||
Deslizamento duradouro |
15 milhões de vezes. |
|||
Nível de proteção (excluindo a cabeça) |
IP5X |
|||
Diâmetro da barra de medição |
φ15 mm+0-0.009 |
|||
Alimentação |
DC 4.5 V~DC 5.5 V |
|||
Corrente de funcionamento (com DC 5 V) |
abaixo de 120 mA |
|||
Saída de sinal (com DC 5 V) |
2 sinais de onda quadrada Diferença de fase 90°±20° Tensão do sinal Hi: acima de 4,5 V Lo: abaixo de 0,4 V |
|||
Impedência de saída |
Cerca de 22 Ω |
|||
Resistência à vibração (sem eletricidade)*3 |
147 m/s23 eixos em todas as direções (75 minutos cada) 10 Hz a 150 Hz Frequência de varredura aumentada 10 repetições |
|||
Resistência ao choque (sem eletricidade)*3 |
1470 m/s23 eixos em todas as direções ± X, Y, Z 3 vezes cada impacto de semionda sinusoidal Tempo de ação 6 ms |
|||
Gama de temperatura de uso |
0 ℃~40 ℃ |
|||
Salvar o intervalo de temperatura |
-10 ℃~55 ℃ |
|||
Comprimento do cabo |
Aproximadamente 4,9 m |
|||
Peso (com cabo, conector) |
Cerca de 570 g |
Cerca de 655 g |
Cerca de 570 g |
Cerca de 655 g |
Acessórios |
Instruções de uso, placas |
|||
*1 Os dados em ( ) são dados do uso de contadores DG-4140/ DG-4160/ DG-4190/ DG-5100/ DG-3000.
*2 Quando usado na direção para cima, a barra de medição pode não ser totalmente reiniciada.
*3 A resistência à vibração e ao impacto na medição, os valores de desempenho mostrados na tabela de especificações não são garantidos.
*4 Quando o cabo de sinal é cortado, conectado ou transformado, ele não estará em conformidade com as especificações CE.
Características do produto:
Tipo comum (universal, IP64)
GS-1713A、GS-1730A、GS-1813A、GS-1830A
Substituição da série GS-1500/1600.
● Usar mecanismo de rolamento de esferas para melhorar a vida útil do produto original.
Especificações técnicas (alcance/resolução): GS-1713A(13mm/10um)、GS-1730A(30mm/10um)、GS-1813A(13mm/1um)、GS-1830A(30mm/1um)
Parâmetros técnicos:
Modelo |
GS-1713A |
GS-1730A |
GS-1813A |
GS-1830A |
Alcance de medição |
13 mm |
30 mm |
13 mm |
30 mm |
Resolução |
10 μm |
1 μm |
||
Precisão de exibição (20 °C) |
3 μm |
3 μm |
2 μm |
3 μm |
Velocidade de resposta ※1 |
1(4) m/s |
0.3(1.2) m/s |
||
Medição da pressão (para baixo) *2 |
1.7 NAbaixo |
2.0 NAbaixo |
1.7 NAbaixo |
2.0 NAbaixo |
Medição da faixa de ajuste da pressão (opcional) *2 |
- |
|||
Deslizamento duradouro |
500 Mais de mil vezes. |
|||
Nível de proteção (excluindo a cabeça) |
IP64 |
|||
Diâmetro da barra de medição |
φ15 mm+0-0.009 |
|||
Alimentação |
DC 4.5 V~DC 5.5 V |
|||
Corrente de funcionamento (com DC 5 V) |
120 mAAbaixo |
|||
Saída de sinal (com DC 5 V) |
2Sinal de onda polar Diferença de fase 90°±20° Tensão do sinal Hi: acima de 4,5 V Lo: abaixo de 0,4 V |
|||
Impedência de saída |
Cerca de 22 Ω |
|||
Resistência à vibração (sem eletricidade)*3 |
98 m/s2 3Em todas as direções do eixo (75 minutos cada) 10 Hz a 150 Hz Aumento da frequência de varredura 10 repetições |
|||
Resistência ao choque (sem eletricidade)*3 |
980 m/s2 3± X, Y, Z 3 vezes em todas as direções do eixo Impacto de semionda sinusoidal Tempo de ação 6 ms |
|||
Gama de temperatura de uso |
0 ℃~40 ℃ |
|||
Salvar o intervalo de temperatura |
-10 ℃~55 ℃ |
|||
Comprimento do cabo |
aproximadamente 1,9 m |
|||
Peso (com cabo, conector) |
Cerca de 250 g |
Cerca de 310 g |
Cerca de 250 g |
Cerca de 310 g |
Acessórios |
Instruções de uso, placas |
|||
※1No caso de contadores da nossa empresa, os dados () são dados do uso do DG-4140/ DG-4160/ DG-4190/ DG-5100/ DG-3000.
*2 Quando usado na direção para cima, a barra de medição pode não ser totalmente reiniciada.
*3 A resistência à vibração e ao impacto na medição, os valores de desempenho mostrados na tabela de especificações não são garantidos.
*4 Quando o cabo de sinal é cortado, conectado ou transformado, ele não estará em conformidade com as especificações CE.
Guangzhou Chengmin Electronic Technology Co., Ltd. fornece a gama completa de instrumentos de teste de medição Ono ONOSOKKI do Japão! Fornecimento parcial!
Tipo comum:GS-1713A、GS-1730A、GS-1813A、GS-1830A
Resistência:GS-6713A、GS-6730A、GS-6813A、GS-6830A
Resistência ao óleo:GS-4713A、GS-4730A、GS-4813A、GS-4830A
Largura do programa:、 GS-5051A、GS-5100A、GS-5101A
Tipo de alta resolução:GS-3813A、GS-3830A
Sensor de velocidade:
IP-292、IP-296、IP-3000A、OM-1200、OM-1500、VP-201、VP-202、FS-540、MP-911、MP-930、MP-935、MP-936、MP-940A、MP-950、MP-954、MP-962、MP-963、MP-992、MP-9100、MP-9120、MP-9200、MP-981、AP-981、MP-9820、LG-9200、MP-911、MP-930、MP-935、MP-936、MP-940A、MP-950、MP-954、MP-962、MP-963、MP-992、MP-9100、MP-9120、MP-9200、
Velocidade Ono:
SE-1200、SE-2500、SE-1620、HT-3200、HT-4200、HT-5500、HT-6100、HT-6200、FT-7200、HR-6800、GE-1400、EC-2100
Princípio de funcionamento do sensor de deslocamento digital:
|
(Figura 1)
|
|
|
(Figura 2)
| |


O medidor de deslocamento digital é composto por um sensor de deslocamento digital e um indicador de contagem.
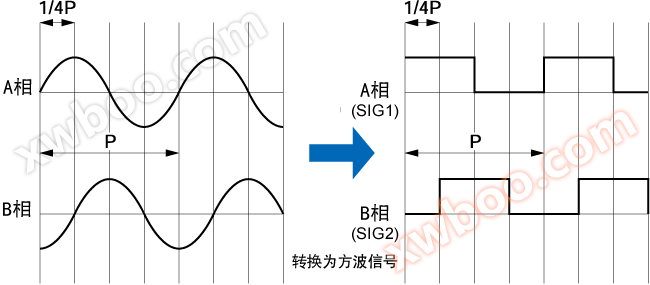
Sensor de deslocamento digital, cuja parte da barra de medição é fixamente ligada à rede móvel, a rede móvel e a parte da barra de medição se movem simultaneamente, com uma rede fixa em uma determinada posição separada da rede móvel. Cada raster é impresso em uma escala de luz e escuridão a um certo intervalo. Para facilitar a contagem de acordo com a direção de movimento (+, -direção) da barra de medição, A e B são duas rejas fixas, onde a reja B se desvia 1/4P (comprimento de onda) da reja A. A fonte de luz é projetada para o sensor fixando e movendo 2 rasters. (Figura 1)
Se a rede móvel se mover em relação à rede fixa, a luz que passa pela rede fixa produz mudanças alternadas de luz e escuridão. Neste momento, você pode obter dois sinais de onda quadrada com diferença de fase de 90 ° do período, de acordo com o avanço ou atraso das fases entre os sinais, você pode determinar a direção do movimento da barra de medição, fazer a soma da contagem e diminuir o deslocamento de bits medido. (Figura 2)
O 1P (comprimento de onda) do sinal de saída do sensor de deslocamento digital é de 4 μm (modelo com resolução de 1 μm) ou 40 μm (modelo com resolução de 10 μm). O contador é processado em quadruplicação e 1P (comprimento de onda) pode ser dividido em quatro cálculos para obter uma resolução de medição de 1/4P (1 μm ou 10 μm). (excluindo a série HS)
* 1P (comprimento de onda) da série GS-7000 é de 2 μm
Princípio de funcionamento do sensor de deslocamento:
O sensor de deslocamento também conhecido como sensor linear, é dividido em sensor de deslocamento indutivo, sensor de deslocamento capacitivo, sensor de deslocamento fotoelétrico, sensor de deslocamento ultrasônico, sensor de deslocamento Hall.
O sensor de deslocamento é um dispositivo linear pertencente à indução de metal, depois de ligar a fonte de energia, na superfície de indução do interruptor gerará um campo magnético alternado, quando o objeto metálico se aproxima desta superfície de indução, o metal gerará um vortex e absorverá a energia do oscilador, permitindo que a amplitude de saída do oscilador diminua linearmente, em seguida, de acordo com a mudança da quantidade de decadência para completar o propósito de detecção sem contato do objeto.
O sensor de deslocamento tem contato deslizante, não é afetado por fatores não metálicos como poeira ao trabalhar, e é de baixo consumo de energia e longa vida útil e pode ser usado em uma variedade de condições difíceis.
Os sensores de deslocamento são usados principalmente na linha de produção de equipamentos de automação para o controle inteligente da quantidade analógica.
Princípio de funcionamento do sensor de deslocamento linear magnético:
Quando trabalhado, o circuito eletrônico dentro do armazém eletrônico gera um impulso inicial, este impulso inicial é transmitido no fio condutor de onda, ao mesmo tempo que gera um campo magnético rotativo ao longo da direção do fio condutor de onda, quando este campo magnético se encontra com o campo magnético * no anel magnético ou na bola flutuante, produz um efeito de elasticidade magnética, tornando o fio condutor de onda torcido, esta torção é percebida e convertida em um impulso corrente correspondente instalado no armazém eletrônico, calculando a diferença de tempo entre os dois pulsos através do circuito eletrônico, que pode medir com precisão o deslocamento medido e o nível do líquido.
Este produto é usado principalmente em sistemas de medição de deslocamento e nível de líquidos que exigem alta precisão de medição e utilizam ambientes mais difíceis. Tem alta precisão, boa repetibilidade, estabilidade e confiabilidade, medição sem contato, longa vida útil, fácil instalação e alta adaptabilidade ambiental.
Seu sinal de saída é uma saída de posição absoluta real, em vez de um sinal proporcional ou que necessita de reamplicação, por isso não há desvios ou variações de sinal e, portanto, não é necessário marcar e manter regularmente como outros sensores de nível de líquido; É porque seu sinal de saída é absoluto que, mesmo que a conexão de energia seja interrompida, não será um problema para a recepção de dados, muito menos para voltar a zero.
Com vantagens significativas em comparação com outros transmissores de nível ou medidores de nível, ele pode ser amplamente utilizado nas indústrias do petróleo, química, farmacêutica, alimentos, bebidas e outras, para medir e controlar o nível de vários tanques de líquidos. Como um sensor de deslocamento, ele mede não apenas o deslocamento linear de um objeto em movimento, mas também dá sinais simultâneos de velocidade para o objeto em movimento.
O sensor de corrente turbulenta é composto por uma combinação de preamplificador DJ e sonda de corrente turbulenta, um sistema de sensor de proximidade. Devido à sua confiabilidade de trabalho a longo prazo, alta sensibilidade, forte capacidade anti-interferência, a adoção de medição sem contato, velocidade de resposta rápida, resistência a altas temperaturas, pode trabalhar contínuamente a longo prazo em ambientes difíceis como óleo, vapor, água e outros, a detecção não é afetada pela poluição de óleo, vapor e outros meios, tem sido amplamente utilizado em grandes e médias empresas como eletricidade, petroquímica, metalurgia, aço, aeronáutica, aeroespacial e outras, para vários movimentos de eixo de máquinas rotativas, vibração, velocidade de rotação, distância de expansão, eccentricidade, espessura da película de óleo e proteção de segurança on-line, fornecendo características dinâmicas holográficas para o sistema de diagnóstico de precisão, protegendo eficazmente o equipamento. Os sistemas de sensores de deslocamento de fluxo turbulento incluem principalmente sondas, cabos de extensão (opcionais), pré-aparelhos e acessórios. Ampla gama linear, boa resposta dinâmica e resistência à interferência.
O sensor de fluxo turbulento é um sensor de deslocamento sem contato baseado no efeito turbulento de alta frequência. A corrente de alta frequência gerada dentro do precursor flui do oscilador para a bobina da sonda, que gera um campo eletromagnético de alta frequência. Quando a superfície do metal medido está próxima da bobina, devido ao efeito do campo eletromagnético de alta frequência, uma corrente de indução é gerada na superfície do metal, ou seja, um fluxo turbulento elétrico. A corrente produz um campo magnético alternado, na direção oposta ao campo magnético da bobina, e a iteração dos dois campos magnéticos altera a impedância da bobina original. Portanto, a mudança na distância da sonda da superfície metálica medida pode ser medida pela mudança na impedância da bobina da sonda. O pré-aparelho produz uma tensão de corrente contínua proporcional à distância de acordo com a mudança na impedância da bobina da sonda.
Inquérito em linha
-
Contactos
-
Empresa
-
Telefone
-
E- mail
-
WeChat
-
Código de verificação
-
Conteúdo da Mensagem
-